0%
test
单调队列
test_sh
test
java01
一、基础知识
- 跨平台性
- 通过java语言编写的应用程序可以在不同的系统平台上都可以运行
- 原理:只需要运行Java的操作系统上安装Java虚拟机即JVM,由JVM来负责Java在系统中的运行
- 因为有了JVM,Java可以跨平台运行
- JRE = JVM + Java程序所需要的核心类库
- JDK = JRE + Java开发工具
二、基础语法
hello world
- 写程序
1
2
3
4
5
6
7class HelloWorld
{
public static void main(String[] args)
{
System.out.println("Hello world!");
}
}- 解释:
- class是用来定义类的,格式是: class 类名 {}
- 程序要独立运行,必须有主方法,格式是:public static void main(String[] args){}
- 程序要输出内容,必须有输出语句,格式是:System.out.println(“hello world!”);
- 编译与运行
- 编译:javac命令编译程序,后面跟的是文件名称,javac HelloWorld.java
- 运行:java命令执行程序,后面跟的是class文件 名称,不含扩展名 java HelloWorld
- 一个完成的Java程序
- 编写Java源程序
- 通过javac命令编译java程序,生成字节码文件
- 通过java命令运行字节码文件
path环境变量
- 为什么要配置path环境变量
为了让javac和java命令可以在任意目录下使用 - 如何配置
- 直接修改path,在前面追加JDK的bin目录
- 新建JAVA_HOME: JDK的安装目录
修改path: %JAVA_HOME%\bin;后面是以前的环境变量
- 为什么要配置path环境变量
classpath环境变量
- 为什么要配置classpath环境变量
为了让class文件可以在任意目录下运行 - 如何配置
新建:classpath,把你想要在任意目录下运行的class文件所在目录配置过去即可。 注意:将来在执行的时候,有先后顺序关系 - path和classpath的区别
path是为了让exe文件可以在任意目录下运行 classpath是为了让class文件可以在任意目录下运行
- 为什么要配置classpath环境变量
注释
- 注释:用于解释说明程序的文字
- 分类:
- 单行://注释文字
- 多行:/* 注释文字 */
- 文档注释:/** 注释文字 */
- 带注释的HelloWorld案例
(4)注释的作用: A:解释说明程序,提高程序的阅读性 B:帮助我们调试程序
关键字
- 关键字:被Java赋予特定含义的单词
- 特点:全部小写
- 注意事项:
- goto和const作为保留字存在,目前不使用
- 类似于Editplus这样的高级记事本,会对关键字有特殊颜色标记,方便记忆
标识符
- 标识符:给类,接口,方法或者变量起名字的符号
- 组成规则:
- 英文字母大小写
- 数字
- _和$
- 注意事项:
- 不能以数字开头
- 不能是Java中的关键字
- 区分大小写
Student,student 这是两个名称
- 常见命名方式:
- 包 其实就是文件夹,用于解决相同类名问题
全部小写
单级:com
多级:cn.itcast - 类或者接口
一个单词:首字母大写
Student,Person,Teacher
多个单词:每个单词的首字母大写
HelloWorld,MyName,NameDemo - 方法或者变量
一个单词:全部小写
name,age,show()
多个单词:从第二个单词开始,每个单词首字母大写
myName,showAllStudentNames() - 常量
一个单词:全部大写
AGE
多个单词:每个单词都大写,用_连接
STUDENT_MAX_AGE
- 包 其实就是文件夹,用于解决相同类名问题
常量
- 常量:在程序的运行过程中,其值不发生改变的量。
- 常量的分类:
- 字面值常量
- 自定义常量(面向对象部分讲)
- 字面值常量
- 字符串常量 用””括起来的内容。举例:”helloworld”
- 整数常量 举例:1,200
- 小数常量 举例:12.5
- 字符常量 用’’括起来的内容。举例:’a’,’A’,’0’
- 布尔常量 比较特殊,只有两个值。举例:true,false
- 空常量 null(数组部分讲)
- Java中针对整数常量的表现形式
- 二进制:由0,1组成。以0b开头
- 八进制:由0,1,2,3,4,5,6,7组成。以0开头
- 十进制:由0,1,2,3,4,5,6,7,8,9组成。默认是十进制。
- 十六进制:由0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F组成。以0x开头。注意:字母不区分大小写。
进制
- 一种计数的方式。x进制表示逢x进1。
- 进制转换
- 其他进制到十进制
系数*基数^权之和。 - 十进制到其他进制
除基取余,直到商为0,余数反转。 - 快速转换
- 二进制和十进制
8421码 - 二进制和八进制
三位组合 - 二进制和十六进制
四位组合
- 二进制和十进制
- 任意X进制到任意Y进制的转换
可以使用十进制作为桥梁即可。
- 其他进制到十进制
有符号数据表示法
计算机中数据的存储和运算都是采用补码进行的。
数据的有符号表示法
用0表示正号,1表示负号。
- 原码
正数:正常的二进制 负数:符号位为1的二进制 - 反码
正数:和原码相同 负数:和原码的区别是,符号位不变,数值位取反。1变0,0变1 - 补码
正数:和原码相同 负数:反码+1
- 原码
补充:float浮点数在计算机中的表示
符号位 指数位 底数位 S E M
变量
数据类型
- 
类型转换
运算符
算数运算符
赋值运算符
关系运算符
逻辑运算符
Batch Normalization
推荐算法面经总结1
- 逻辑斯特回归为什么要对特征进行离散化?
- 非线性!非线性!非线性!逻辑回归属于广义线性模型,表达能力受限;单变量离散化为N个后,每个变量有单独的权重,相当于为模型引入了非线性,能够提升模型表达能力,加大拟合; 离散特征的增加和减少都很容易,易于模型的快速迭代;
- 速度快!速度快!速度快!稀疏向量内积乘法运算速度快,计算结果方便存储,容易扩展;
- 鲁棒性!鲁棒性!鲁棒性!离散化后的特征对异常数据有很强的鲁棒性:比如一个特征是年龄>30是1,否则0。如果特征没有离散化,一个异常数据“年龄300岁”会给模型造成很大的干扰;
- 方便交叉与特征组合:离散化后可以进行特征交叉,由M+N个变量变为M*N个变量,进一步引入非线性,提升表达能力;
- 稳定性:特征离散化后,模型会更稳定,比如如果对用户年龄离散化,20-30作为一个区间,不会因为一个用户年龄长了一岁就变成一个完全不同的人。当然处于区间相邻处的样本会刚好相反,所以怎么划分区间是门学问;
- 简化模型:特征离散化以后,起到了简化了逻辑回归模型的作用,降低了模型过拟合的风险。
CPU存储器&随机读取&顺序读取(CSAPP chapter6)
1. 存储器层次化结构
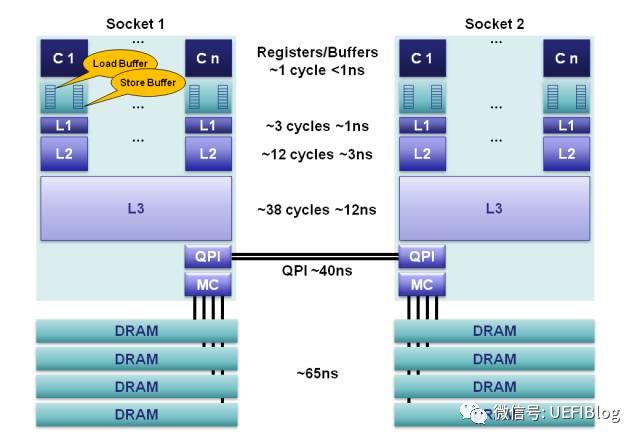
存储器有很多种类,我们常见的有内存、磁盘,还有平时看不到的集成在CPU内部的寄存器、高速缓存等。
存储器是分层次的,离CPU越近的存储器,速度越快,每字节的成本越高,同时容量也因此越小。寄存器速度最快,离CPU最近,成本最高,所以个数容量有限,其次是高速缓存(缓存也是分级,有L1,L2等缓存),再次是主存(普通内存),再次是本地磁盘。
寄存器的速度最快,可以在一个时钟周期内访问,其次是高速缓存,可以在几个时钟周期内访问,普通内存可以在几十个或几百个时钟周期内访问。
正常来说,存储器的容量和性能应该伴随着CPU的速度和性能提升而提升,以匹配CPU的数据处理。但随着时间的推移,CPU和存储器在性能上的发展差异越来越大,存储器在性能增长越来越跟不上CPU性能发展的需要。
那怎么办呢?
为了缩小存储器和CPU之间的性能差距,通常在计算机内部采用层次化的存储器体系结构,以此来发挥出存储器的综合性能。
存储器层次化结构如下:

最上层的是寄存器,存取时间极快,但容量小。其次是高速缓存,存取时间次之,容量比寄存器大一些。再往下就是我们常见的内存、硬盘,存取速度递减,但容量越来越大。
CPU在访问数据时,数据一般在相邻两层之间复制传送,且总是从慢速存储器复制到快速存储器,通过这种方式保证CPU的速度和存储器的速度相匹配。
2. cache介绍
什么是cache
Cache Memory也被称为Cache,是存储器子系统的组成部分,存放着程序经常使用的指令和数据,这就是Cache的传统定义。从广义的角度上看,Cache是快设备为了缓解访问慢设备延时的预留的Buffer,从而可以在掩盖访问延时的同时,尽可能地提高数据传输率。 快和慢是一个相对概念,与微架构(Microarchitecture)中的 L1/L2/L3 Cache相比, DDR内存是一个慢速设备;在磁盘 I/O 系统中,DDR却是快速设备,在磁盘 I/O 系统中,仍在使用DDR内存作为磁介质的Cache。在一个微架构中,除了有L1/L2/L3 Cache之外,用于虚实地址转换的各级TLB, MOB( Memory Ordering Buffers)、在指令流水线中的ROB,Register File和BTB等等也是一种Cache。我们这里的Cache,是狭义 Cache,是CPU流水线和主存储器的 L1/L2/L3 Cache。
cache,中译名高速缓冲存储器,其作用是为了更好的利用局部性原理,减少CPU访问主存的次数。简单地说,CPU正在访问的指令和数据,其可能会被以后多次访问到,或者是该指令和数据附近的内存区域,也可能会被多次访问。因此,第一次访问这一块区域时,将其复制到cache中,以后访问该区域的指令或者数据时,就不用再从主存中取出。
各级cache读取延迟
L1cache,L2cache,L3cache,虽然它们都是由CAM(Content Addressable Memory )为主体的tag和SRAM组成的,但是区别却是明显的:L1(先不考虑指令和数据L1的不同)是为了更快的速度访问而优化过的,它用了更多/更复杂/更大的晶体管,从而更加昂贵和更加耗电;L2相对来说是为提供更大的容量优化的,用了更少/更简单的晶体管,从而相对便宜和省电。同样的道理还可以推广到L2和L3上。
在同一代制程中,单位面积可以放入晶体管的数目是确定的,这些晶体管如果都给L1则容量太少,Cache命中率(Hit Rate)严重降低,功耗上升太快;如果都给L2,容量大了但延迟提高了一个数量级:
如何平衡L1、L2和L3,用固定的晶体管数目达成最好的综合效果,这是一种平衡的艺术。在多年实践之后,现在已经相对固定下来,Intel和AMD的L1 Cache命中率,现在往往高于95%,增加更多的L1效果不是很显著,现在更多的是增大L3,以达到花同样的代价,干更多的事的目的。
为什么cache不会越做越大
L3现在动辄数十M,比以往那是阔绰很多了,但相对摩尔定律增长的内存容量来说则大幅落后。为什么Cache增长这么缓慢?还是Cost的问题。一个最简单的SRAM就要消耗6个晶体管:
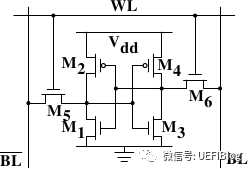
再加上Tag,最少需要数十个晶体管,代价很大。我们花这么大的代价增加Cache,衡量性能的命中率是如何变化的呢?
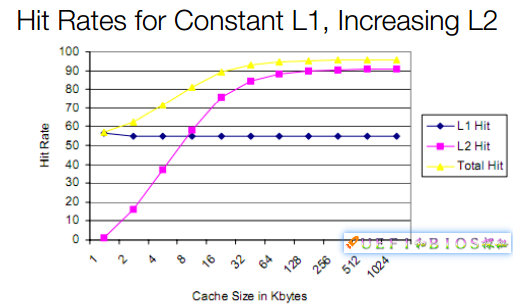
为简化起见,我们假设L1维持在不到60%的命中率(实际情况95%左右)。从图中可以看出,随着L2容量的增加,开始时L2和整体命中率快速提高,这表明提高L2容量效用很明显。随后L2的命中率在容量增加到64KB后增长趋缓,而整体命中率也同时趋缓,最后甚至基本不大变化了。增加同样的晶体管,而受益却越来越少,出现了边际效用递减的问题。
3. 程序访问的局部性
最早期的计算机,在执行一段程序时,都是把硬盘中的数据加载到内存,然后CPU从内存中取出代码和数据执行,在把计算结果写入内存,最终输出结果。
其实这么干,本身没有什么问题,但后来程序运行越来越多,就发现一个规律:内存中某个地址被访问后,短时间内还有可能继续访问这块地址。内存中的某个地址被访问后,它相邻的内存单元被访问的概率也很大。
人们发现的这种规律被称为程序访问的局部性。
程序访问的局部性包含2种:
- 时间局部性:某个内存单元在较短时间内很可能被再次访问
- 空间局部性:某个内存单元被访问后相邻的内存单元较短时间内很可能被访问
出现这种情况的原因很简单,因为程序是指令和数据组成的,指令在内存中按顺序存放且地址连续,如果运行一段循环程序或调用一个方法,又或者再程序中遍历一个数组,都有可能符合上面提到的局部性原理。
那既然在执行程序时,内存的某些单元很可能会经常的访问或写入,那可否在CPU和内存之间,加一个缓存,CPU在访问数据时,先看一下缓存中是否存在,如果有直接就读取缓存中的数据即可。如果缓存中不存在,再从内存中读取数据。
事实证明利用这种方式,程序的运行效率会提高90%以上,这个缓存也叫做高速缓存Cache。
4. 高速缓存cache原理
高速缓存Cache是非常小容量的存储器,它集成在CPU芯片内。为了便于CPU、高速缓存Cache、内存之间的信息交换,内存按块划分,高速缓存Cache按行或槽划分。
CPU对内存、高速缓存Cache进行数据访问的流程如图:
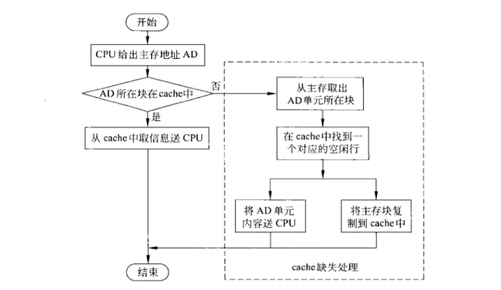
CPU先查询Cache中是否有数据,如果有,直接读取即可。
如果Cache中没有,则从内存中读取数据,同时把数据放入Cache中,然后把数据返回给CPU。
整个流程其实很简单,但对于Cache和内存信息的交换,需要考虑一些问题:
- 对于CPU读取数据,如果Cache中没有数据,从内存中读取数据后,如何分配到Cache中?
- 如果Cache满了,采用什么策略替换?
- 对于CPU写入数据,如何保证Cache和内存数据的一致性?
对于这3个问题,下面依次来分析是如何解决的。
5. CPU和cache的内存映射
对于第一个问题,Cache中没有命中数据时,内存数据是如何分配到Cache中的。
由于内存的容量比Cache容量要大,两者之间的容量不匹配,所以内存数据填充到Cache中,就需要设计一种规则来保证Cache的利用率最大,保证CPU访问Cache的命中率最高。
内存到Cache的映射规则有3种方式:
- 直接映射:每个内存块数据只映射到固定的缓存行中
- 全相联映射:每个内存块数据可以映射到任意缓存行中
- 组相联映射:每个内存块数据可以映射到固定组的任意缓存行中
下面我们分别来看这3种映射方式。
直接映射
访问内存数据会给出一个内存地址,首先把这个内存地址,按位划分为3个字段:标记、Cache行号、块内地址,如图:

然后根据第2个字段的二进制位进行取模运算,得到对应的Cache行号。
找到对应的Cache号后,校验Cache的有效位,如果有效,再比较内存第1个字段的标记与Cache的标记是否一致,如果一致,直接获取Cache中的数据即可。
如果有效位无效,或有效位有效但内存第1个字段的标记与Cache的标记不一致,那么根据内存地址去内存获取数据,然后把对应的Cache行有效位设置为有效,标记设置为与内存标记一致,并在Cache中记录内存的数据,以便下次获取。
具体映射关系如图:
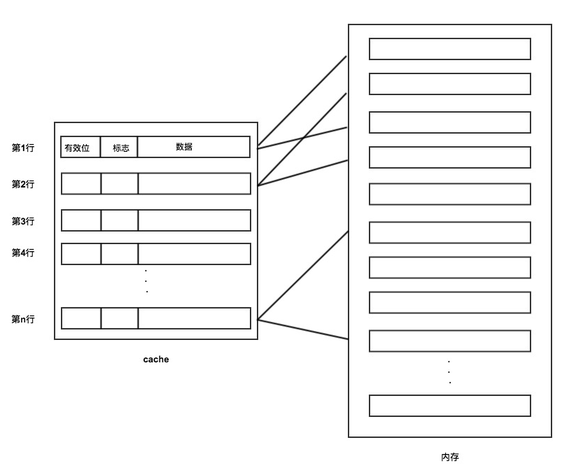
可见Cache与内存的映射可能是一对多的,即不同内存块可能映射到同一Cache行。
这种映射方式比较简单粗暴,如果缓存不命中或内存和Cache标识不一致,就会替换Cache行中的数据。这就可能导致同一Cache行在短时间内被频繁替换,命中率不高。
全相联映射
全相联映射与直接映射方式不同的是,它把内存分成2个字段:标记、块内地址,没有了Cache行号这个字段。

在访问数据时,直接根据内存地址中的标记,去直接遍历对比每一个Cache行,直到找到一致的标记的Cache行,然后访问Cache中的数据即可。
如果遍历完Cache行后,没有找到一致的标记,那么会从内存中获取数据,然后找到空闲的Cache行,直接写入标记和数据即可。
也就是说,这种映射方式,就是哪里有空闲的Cache行,我就把内存块映射到这个Cache行中。在访问时,依次遍历Cache行,直到找到标记一直的Cache行,然后读取数据。
这种方式虽然在空间利用率上保证最大化,但其缺点在于要在Cache中寻找符合标识一致的行的时间要比直接映射的时间久,效率较低。
那有什么方式能集合上面2种方式,发挥各自的优势呢?这就是下面要说的组相联映射方式。
组相联映射方式
组相联映射方式把内存也分为3个字段:标记、Cache组号、块内地址

注意,与直接映射不同的是,第2个字段是组号而不是行号。这种方式把Cache行先进行分组,然后每个分组中包含多个Cache行,如图:
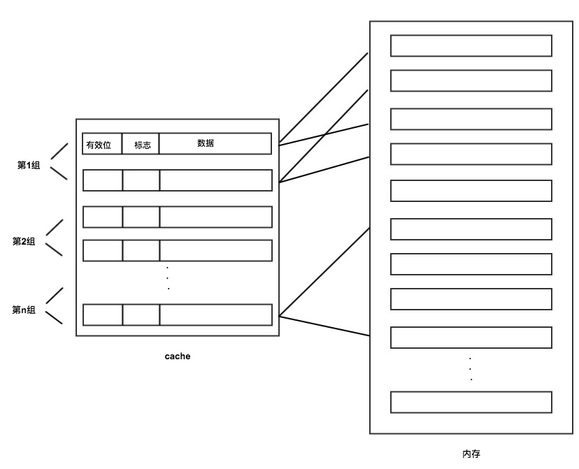
在访问数据时,先根据内存地址中的Cache组号,定位到Cache的分组,然后在这个组内,依次遍历每个行,寻找标记一致的Cache行,如果标记一致则获取数据,不一致则从内存中获取数据后写入当前组内空闲的任意一个Cache行中。
这种方式兼顾了访问速度和空间利用率,使用前2种方式结合的方案,保证缓存命中率最大化。在现实中实际上采用的这种映射方式。
6. cache替换算法
对于上面提的第2个问题,如果Cache满了,如何进行替换?
Cache容量比内存小,所以内存数据映射到Cache时,必然会导致Cache满的情况,那之后的内存映射要替Cache中的哪些行呢?这就需要制定一种策略。
常见的替换算法有如下几种:
- 先进先出算法(FIFO):总是把最早装入Cache的行替换掉,这种算法实现简单,但不能正确反映程序的访问局部性,命中率不高
- 最近最少使用算法(LRU):总是选择最近最少使用的Cache行替换,这种这种算法稍微复杂一些,但可以正确反映程序访问的局部性,命中率最高
- 最不经常使用算法(LFU):总是替换掉Cache中引用次数最少的行,与LRU类似,但没有LRU替换方式更精准
- 随机替换算法(Random):随机替换掉Cache中的行,与使用情况无关,命中率不高
现实使用最多的是最近最少使用算法(LRU)进行Cache行的替换方案,这种方案使得缓存的命中率最高。
7. cache的一致性问题
上面提的第3个问题,对于写入的数据,如何保证Cache和内存数据的一致性?
试想,如果CPU想要修改某个内存的数据,这块内存的数据刚好在Cache中存在,那么是不是要同时更新Cache中的数据?
这个写入数据的过程,通常采用2种方式:
- 全写法(通写法/直写法/写直达法)
- 回写法(写回法)
全写法
在写操作时,如果Cache命中,则同时写Cache和内存。
如果Cache中不命中,则分为以下2种情况:
- 写分配法:先更新内存数据,然后再写入空闲的Cache行中,保证Cache有数据,提高了缓存命中率,但增加了写入Cache的开销
- 非写分配法:只更新内存数据,不写入Cache,只有等访问不命中时,再进行缓存写入
另外,这种方式为了减少内存的写入开销,一般会在Cache和内存之间加一个写缓冲队列,在CPU写入Cache的同时,也会写入缓冲队列,然后由存储控制器将缓冲队列写入内存。
如果在写操作不频繁的情况下,效果很好。但如果写操作频繁,则会导致写缓冲队列饱和而发生阻塞。
回写法
这种方式在写操作时,如果Cache命中,则只更新Cache而不更新内存。
如果Cache不命中,则从内存中读取内容,写入Cache并更新为最新内容。
这种方式不会主动更新内存,只有在Cache被再次修改时,才将内容一次性写入内存。这样做的好处是减少了写内存的次数,大大降低内存带宽需求。但有可能在某个时间点,Cache和内存中的数据会出现不一致的情况。
8. 影响Cache的性能因素
既然Cache在CPU访问数据时提升的效率这么高,那决定Cache性能的因素有哪些?
决定访问性能的重要因素之一就是Cache的命中率,它与许多因素有关,具体涉及如下:
- Cache容量:容量越大,缓存数据越多,命中率越高
- 内存块大小:大的内存交换单位能更好地利用空间局部性,但过大也会导致命中率降低,必须适中
除此之外,如何设计Cache也会影响到它的性能:
- 多级Cache:现在的CPU会采用3级Cache,最大程度的提升命中率
- 内存、总线、Cache连接结构:设计一个效率高的传输通道,能够提升Cache的访问速度
- 内存结构与Cache配合:在访问不命中时,会去访问内存,设计效率高的传输通道与Cache配合也可以提升Cache的性能
9. HDD和SSD的区别
主要是顺序读取和随机读取。
吞吐量
顺序读取看吞吐量:指单位时间内可以成功传输的数据数量。顺序读写频繁的应用,如视频点播,关注连续读写性能、数据吞吐量是关键衡量指标。它主要取决于磁盘阵列的架构,通道的大小以及磁盘的个数。不同的磁盘阵列存在不同的架构,但他们都有自己的内部带宽,一般情况下,内部带宽都设计足够充足,不会存在瓶颈。磁盘阵列与服务器之间的数据通道对吞吐量影响很大,比如一个2Gbps的光纤通道,其所能支撑的最大流量仅为250MB/s。最后,当前面的瓶颈都不再存在时,硬盘越多的情况下吞吐量越大。
IOPS
随机读取看IOPS:IOPS(Input/Output Per Second)即每秒的输入输出量(或读写次数),即指每秒内系统能处理的I/O请求数量。随机读写频繁的应用,如小文件存储等,关注随机读写性能,IOPS是关键衡量指标。可以推算出磁盘的IOPS = 1000ms / (Tseek + Trotation + Transfer),如果忽略数据传输时间,理论上可以计算出随机读写最大的IOPS。常见磁盘的随机读写最大IOPS为: - 7200rpm的磁盘 IOPS = 76 IOPS - 10000rpm的磁盘IOPS = 111 IOPS - 15000rpm的磁盘IOPS = 166 IOPS
HDD
HDD中,顺序读取:预读机制,很快,
随机读取:因为要寻道时间+旋转时间+传输时间
寻道时间一般:3-15ms
旋转时间与转速有关:7200rpm一般4ms,15000rpm一般2ms
机械硬盘的连续读写性能很好,但随机读写性能很差,这主要是因为磁头移动到正确的磁道上需要时间,随机读写时,磁头需要不停的移动,时间都浪费在了磁头寻址上,所以性能不高。
SSD
SSD中,顺序读取:
随机读取:在SSD中,一般会维护一个mapping table,维护逻辑地址到物理地址的映射。每次读写时,可以通过逻辑地址直接查表计算出物理地址,与传统的机械磁盘相比,省去了寻道时间和旋转时间。
区别
所以SSD与HDD的主要区别:
从NAND Flash的原理可以看出,其和HDD的主要区别为
- 定位数据快:HDD需要经过寻道和旋转,才能定位到要读写的数据块,而SSD通过mapping table直接计算即可
- 读取速度块:HDD的速度取决于旋转速度,而SSD只需要加电压读取数据,一般而言,要快于HDD
因此,在顺序读测试中,由于定位数据只需要一次,定位之后,则是大批量的读取数据的过程,此时,HDD和SSD的性能差距主要体现在读取速度上,HDD能到200M左右,而普通SSD是其两倍。
在随机读测试中,由于每次读都要先定位数据,然后再读取,HDD的定位数据的耗费时间很多,一般是几毫秒到十几毫秒,远远高于SSD的定位数据时间(一般0.1ms左右),因此,随机读写测试主要体现在两者定位数据的速度上,此时,SSD的性能是要远远好于HDD的。
10. 总结
本篇文章主要介绍了高速缓存Cache的重点知识,总结如下:
- 程序运行有访问局部性的规律:时间局部性、空间局部性
- 内存与Cache的映射方式有3种:直接映射、全相联映射、组相联映射,其中组相联映射方式命中率最高
- Cache的替换算法有4种:先进先出(FIFO)、最近最少使用(LRU)、最不经常使用(LFU)、随机(Random),其中最近最少使用算法的命中率最高
- 保证内存与Cache的一致性方案有2种:全写法、回写法
- 影响Cache的性能因素有:容量、内存块大小、Cache组合、内存结构与传输通道设计等
- HDD和SSD在顺序读取,随机读取的不同
leetcode141-160
1. 环形链表(Easy)
给定一个链表,判断链表中是否有环。
为了表示给定链表中的环,我们使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。 如果 pos 是 -1,则在该链表中没有环。
示例 1:
1 | 输入:head = [3,2,0,-4], pos = 1 |
示例 2:
1 | 输入:head = [1,2], pos = 0 |
示例 3:
1 | 输入:head = [1], pos = -1 |

进阶:
你能用 *O(1)*(即,常量)内存解决此问题吗?
解答:
思路:
思路一,快慢指针,即双指针法
1 | # Definition for singly-linked list. |
另外,链表置空法
运行速度比双指针慢。
1 | # Definition for singly-linked list. |
2. 环形链表2(Medium)
给定一个链表,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。
为了表示给定链表中的环,我们使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。 如果 pos 是 -1,则在该链表中没有环。
说明:不允许修改给定的链表。
示例 1:
1 | 输入:head = [3,2,0,-4], pos = 1 |
示例 2:
1 | 输入:head = [1,2], pos = 0 |
示例 3:
1 | 输入:head = [1], pos = -1 |
进阶:
你是否可以不用额外空间解决此题?
解答:
思路:
这道题和上述题思路一样
快慢指针找到环中的节点,然后找到环的入口
设两指针fast,slow指向链表头部head,fast每轮走2步,slow每轮走一步:
- fast指针走到链表末端,说明无环,返回null;
- 当fast == slow时跳出迭代break;
- 设两指针分别走了f,s步,设链表头部到环需要走a步,链表环长度b步,则有:
- 快指针走了满指针两倍的路程f = 2s,快指针比慢指针多走了n个环的长度f = s + nb(因为每走一轮,fast与slow之间距离+1,如果有环快慢指针终会相遇);
- 因此可推出:f = 2nb,s = nb,即两指针分别走了2n个环、n个环的周长。
接下来,我们将fast指针重新指向头部,并和slow指针一起向前走,每轮走一步,则有:
当fast指针走了a步时,slow指针正好走了a + nb步,此时两指针同时指向链表环入口。最终返回fast。
1 | # Definition for singly-linked list. |
3. 重排链表(Medium)
给定一个单链表 L:L0→L1→…→L**n-1→Ln ,
将其重新排列后变为: L0→L**n→L1→L**n-1→L2→L**n-2→…
你不能只是单纯的改变节点内部的值,而是需要实际的进行节点交换。
示例 1:
1 | 给定链表 1->2->3->4, 重新排列为 1->4->2->3. |
示例 2:
1 | 给定链表 1->2->3->4->5, 重新排列为 1->5->2->4->3. |
解答:
思路:
双指针思路
快慢指针找到中点
然后将链表一分为二
后面的链表倒序
然后合并两个链表
1 | # Definition for singly-linked list. |
4. 二叉树的前序遍历(Medium)
给定一个二叉树,返回它的 前序 遍历。
示例:
1 | 输入: [1,null,2,3] |
进阶: 递归算法很简单,你可以通过迭代算法完成吗?
解答:
思路:
很简单,递归和迭代都很简单。
迭代
1 | # Definition for a binary tree node. |
递归
1 | # Definition for a binary tree node. |
5. 二叉树的后序遍历(Medium)
给定一个二叉树,返回它的 后序 遍历。
示例:
1 | 输入: [1,null,2,3] |
进阶: 递归算法很简单,你可以通过迭代算法完成吗?
解答:
思路:
迭代
1 | # Definition for a binary tree node. |
递归
1 | # Definition for a binary tree node. |
6. LRU缓存机制(Medium)
运用你所掌握的数据结构,设计和实现一个 LRU (最近最少使用) 缓存机制。它应该支持以下操作: 获取数据 get 和 写入数据 put 。
获取数据 get(key) - 如果密钥 (key) 存在于缓存中,则获取密钥的值(总是正数),否则返回 -1。
写入数据 put(key, value) - 如果密钥不存在,则写入其数据值。当缓存容量达到上限时,它应该在写入新数据之前删除最近最少使用的数据值,从而为新的数据值留出空间。
进阶:
你是否可以在 O(1) 时间复杂度内完成这两种操作?
示例:
1 | LRUCache cache = new LRUCache( 2 /* 缓存容量 */ ); |
解答:
思路:
不用双向链表也可以,就是用字典保存key,value,用数组保存最近访问
1 | class LRUCache(object): |
7. 对链表进行插入排序(Medium)
对链表进行插入排序。
插入排序的动画演示如上。从第一个元素开始,该链表可以被认为已经部分排序(用黑色表示)。
每次迭代时,从输入数据中移除一个元素(用红色表示),并原地将其插入到已排好序的链表中。
插入排序算法:
- 插入排序是迭代的,每次只移动一个元素,直到所有元素可以形成一个有序的输出列表。
- 每次迭代中,插入排序只从输入数据中移除一个待排序的元素,找到它在序列中适当的位置,并将其插入。
- 重复直到所有输入数据插入完为止。
示例 1:
1 | 输入: 4->2->1->3 |
示例 2:
1 | 输入: -1->5->3->4->0 |
解答:
思路:插入排序
1 | # Definition for singly-linked list. |
8. 排序链表(Medium)
在 O(n log n) 时间复杂度和常数级空间复杂度下,对链表进行排序。
示例 1:
1 | 输入: 4->2->1->3 |
示例 2:
1 | 输入: -1->5->3->4->0 |
解答:
思路:
归并排序的原理,很简单
1 | # Definition for singly-linked list. |
9. 直线上最多的点(Medium)
记录给定一个二维平面,平面上有 n 个点,求最多有多少个点在同一条直线上。
示例 1:
1 | 输入: [[1,1],[2,2],[3,3]] |
示例 2:
1 | 输入: [[1,1],[3,2],[5,3],[4,1],[2,3],[1,4]] |
解答:
思路:
这道题比较难
1 | class Solution: |
10. 逆波兰表达式求值(Medium)
根据逆波兰表示法,求表达式的值。
有效的运算符包括 +, -, *, / 。每个运算对象可以是整数,也可以是另一个逆波兰表达式。
说明:
- 整数除法只保留整数部分。
- 给定逆波兰表达式总是有效的。换句话说,表达式总会得出有效数值且不存在除数为 0 的情况。
示例 1:
1 | 输入: ["2", "1", "+", "3", "*"] |
示例 2:
1 | 输入: ["4", "13", "5", "/", "+"] |
示例 3:
1 | 输入: ["10", "6", "9", "3", "+", "-11", "*", "/", "*", "17", "+", "5", "+"] |
11. 翻转字符串里的单词(Medium)
给定一个字符串,逐个翻转字符串中的每个单词。
示例 1:
1 | 输入: "the sky is blue" |
示例 2:
1 | 输入: " hello world! " |
示例 3:
1 | 输入: "a good example" |
说明:
- 无空格字符构成一个单词。
- 输入字符串可以在前面或者后面包含多余的空格,但是反转后的字符不能包括。
- 如果两个单词间有多余的空格,将反转后单词间的空格减少到只含一个。
进阶:
请选用 C 语言的用户尝试使用 O(1) 额外空间复杂度的原地解法。
解答:
思路:
双指针做法
1 | class Solution(object): |
12. 乘积最大子序列(Medium)
给定一个整数数组 nums ,找出一个序列中乘积最大的连续子序列(该序列至少包含一个数)。
示例 1:
1 | 输入: [2,3,-2,4] |
示例 2:
1 | 输入: [-2,0,-1] |
解答:
思路:
动态规划
保存一个局部最小值和最大值
遇到负数则交换两个值
1 | class Solution(object): |
13. 寻找旋转排序数组中的最小值(Medium)
假设按照升序排序的数组在预先未知的某个点上进行了旋转。
( 例如,数组 [0,1,2,4,5,6,7] 可能变为 [4,5,6,7,0,1,2] )。
请找出其中最小的元素。
你可以假设数组中不存在重复元素。
示例 1:
1 | 输入: [3,4,5,1,2] |
示例 2:
1 | 输入: [4,5,6,7,0,1,2] |
解答:
思路:
简单的二分法
1 | class Solution(object): |
14. 寻找旋转排序数组中的最小值2(Hard)
假设按照升序排序的数组在预先未知的某个点上进行了旋转。
( 例如,数组 [0,1,2,4,5,6,7] 可能变为 [4,5,6,7,0,1,2] )。
请找出其中最小的元素。
注意数组中可能存在重复的元素。
示例 1:
1 | 输入: [1,3,5] |
示例 2:
1 | 输入: [2,2,2,0,1] |
说明:
- 这道题是 寻找旋转排序数组中的最小值 的延伸题目。
- 允许重复会影响算法的时间复杂度吗?会如何影响,为什么?
解答:
思路:
和上题一样,二分法
1 | class Solution(object): |
15. 最小栈(Easy)
设计一个支持 push,pop,top 操作,并能在常数时间内检索到最小元素的栈。
- push(x) – 将元素 x 推入栈中。
- pop() – 删除栈顶的元素。
- top() – 获取栈顶元素。
- getMin() – 检索栈中的最小元素。
示例:
1 | MinStack minStack = new MinStack(); |
16. 上下翻转二叉树(Medium)
给定一个二叉树,其中所有的右节点要么是具有兄弟节点(拥有相同父节点的左节点)的叶节点,要么为空,将此二叉树上下翻转并将它变成一棵树, 原来的右节点将转换成左叶节点。返回新的根。
例子:
1 | 输入: [1,2,3,4,5] |
说明:
对 [4,5,2,#,#,3,1] 感到困惑? 下面详细介绍请查看 二叉树是如何被序列化的。
二叉树的序列化遵循层次遍历规则,当没有节点存在时,’#’ 表示路径终止符。
这里有一个例子:
1 | 1 |
上面的二叉树则被序列化为 [1,2,3,#,#,4,#,#,5].
解答:
思路:
这道题很有意思,将左节点变成根节点,根节点变成右节点,右节点变成左节点
1 | # Definition for a binary tree node. |
17. 用Read4读取N个字符(Easy)
给你一个文件,并且该文件只能通过给定的 read4 方法来读取,请实现一个方法使其能够读取 n 个字符。
read4 方法:
API read4 可以从文件中读取 4 个连续的字符,并且将它们写入缓存数组 buf 中。
返回值为实际读取的字符个数。
注意 read4() 自身拥有文件指针,很类似于 C 语言中的 FILE *fp 。
read4 的定义:
1 | 参数类型: char[] buf |
下列是一些使用 read4 的例子:
1 | File file("abcdefghijk"); // 文件名为 "abcdefghijk", 初始文件指针 (fp) 指向 'a' |
read 方法:
通过使用 read4 方法,实现 read 方法。该方法可以从文件中读取 n 个字符并将其存储到缓存数组 buf 中。您 不能 直接操作文件。
返回值为实际读取的字符。
read 的定义:
1 | 参数类型: char[] buf, int n |
示例 1:
1 | 输入: file = "abc", n = 4 |
示例 2:
1 | 输入: file = "abcde", n = 5 |
示例 3:
1 | 输入: file = "abcdABCD1234", n = 12 |
示例 4:
1 | 输入: file = "leetcode", n = 5 |
注意:
- 你 不能 直接操作该文件,文件只能通过
read4获取而 不能 通过read。 read函数只在每个测试用例调用一次。- 你可以假定目标缓存数组
buf保证有足够的空间存下 n 个字符。
18. 用Read4读取N个字符2(Hard)
给你一个文件,并且该文件只能通过给定的 read4 方法来读取,请实现一个方法使其能够读取 n 个字符。注意:你的 read 方法可能会被调用多次。
read4 的定义:
1 | 参数类型: char[] buf |
下列是一些使用 read4 的例子:
1 | File file("abcdefghijk"); // 文件名为 "abcdefghijk", 初始文件指针 (fp) 指向 'a' |
read 方法:
通过使用 read4 方法,实现 read 方法。该方法可以从文件中读取 n 个字符并将其存储到缓存数组 buf 中。您 不能 直接操作文件。
返回值为实际读取的字符。
read 的定义:
1 | 参数: char[] buf, int n |
示例 1:
1 | File file("abc"); |
Example 2:
1 | File file("abc"); |
注意:
- 你 不能 直接操作该文件,文件只能通过
read4获取而 不能 通过read。 read函数可以被调用 多次。- 请记得 重置 在 Solution 中声明的类变量(静态变量),因为类变量会 在多个测试用例中保持不变,影响判题准确。请 查阅 这里。
- 你可以假定目标缓存数组
buf保证有足够的空间存下 n 个字符。 - 保证在一个给定测试用例中,
read函数使用的是同一个buf。
19. 至多包含两个不同字符的最长子串(Hard)
给定一个字符串 s ,找出 至多 包含两个不同字符的最长子串 t 。
示例 1:
1 | 输入: "eceba" |
示例 2:
1 | 输入: "ccaabbb" |
解答:
思路:
滑动窗口,已经很熟练了,很简单的一道题
1 | class Solution(object): |
20. 相交链表(Easy)
编写一个程序,找到两个单链表相交的起始节点。
如下面的两个链表:
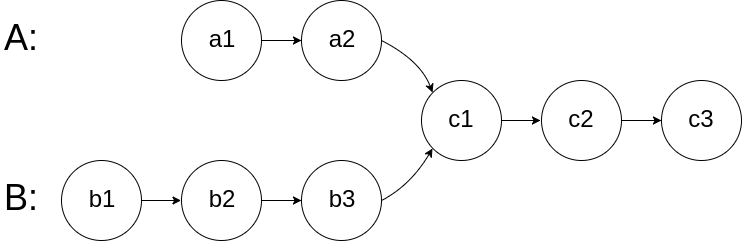
在节点 c1 开始相交。
示例 1:
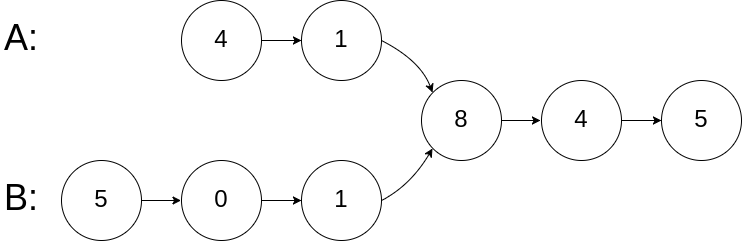
1 | 输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,0,1,8,4,5], skipA = 2, skipB = 3 |
示例 2:
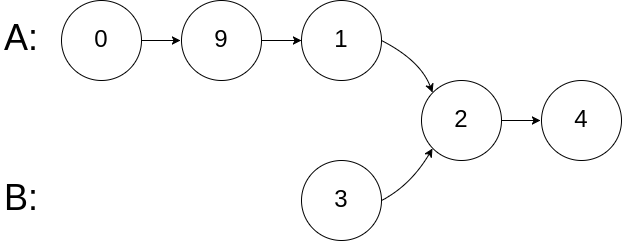
1 | 输入:intersectVal = 2, listA = [0,9,1,2,4], listB = [3,2,4], skipA = 3, skipB = 1 |
示例 3:
1 | 输入:intersectVal = 0, listA = [2,6,4], listB = [1,5], skipA = 3, skipB = 2 |
注意:
- 如果两个链表没有交点,返回
null. - 在返回结果后,两个链表仍须保持原有的结构。
- 可假定整个链表结构中没有循环。
- 程序尽量满足 O(n) 时间复杂度,且仅用 O(1) 内存。
解答:
思路:双指针加链表拼接
1 | # Definition for singly-linked list. |